

BUBBLE ist das Höhenforschungsballon-Programm von KSat. Das Ziel des Programms ist es, kostengünstig und mit relativ geringem Aufwand die Durchführung von Experimenten in der Stratosphäre zu ermöglichen. Es werden sowohl KSat-interne Experimente (beispielsweise Komponententests für Kleinsatelliten) als auch externe Nutzlasten geflogen.
Der heliumgefüllte Ballon wird hier in Stuttgart von uns gestartet und erreicht nach ca. 90 min eine Flughöhe von 30 km. Während des Fluges fällt die Außentemperatur auf bis zu -60° C. Nachdem der Ballon aufgrund des geringen Umgebungsdruckes (ca. 10 mbar) geplatzt ist, sinkt BUBBLE an einem Fallschirm zurück zu Boden. Dort wird die Ballongondel dann von unseren Verfolgungsfahrzeugen geborgen.

Um eine zuverlässige und schnelle Bergung der Gondel zu ermöglichen, wird deren Position über ein zweifach redundantes System an die Bodenstationen übermittelt. Zusätzlich können auch Nutzlastdaten übertragen werden. Außerdem wird die Nutzlast von BUBBLE mit Energie versorgt und bei Bedarf vor den niedrigen Temperaturen geschützt. Die maximale Nutzlastmasse beträgt in der Regel 1 kg.
Wenn Sie Interesse daran haben, eine Nutzlast mit BUBBLE zu starten, wenden Sie sich bitte einfach an:
Unten werden die bisherigen Missionen im BUBBLE-Programm in chronologischer Reihenfolge beschrieben.
BUBBLE 1
Nutzlast
Die Nutzlast von BUBBLE 1 stammt vom Institut für Raumfahrtsysteme (IRS) der Universität Stuttgart. Sie besteht aus zwei Sensoren, die die Helligkeit des Himmels messen. Die Messung wird zur Tageszeit durchgeführt, um die Abnahme von Streulicht während des Aufstiegs zu erfassen. Anders ausgedrückt: Wie schwarz ist der Himmel in 30 km Höhe?
Warum ist das interessant? Das IRS betreibt federführend das Projekt ESBO DS. Das ist eine Designstudie für ein ballonbasiertes Teleskop, welches durch die große Operationshöhe von 30-40 km atmosphärische Störeinflüsse bei der Beobachtung von Himmelsobjekten stark minimiert. Dabei ist es jedoch nicht annähernd so kostenintensiv wie ein Weltraumteleskop. Außerdem sind bei einem Ballonteleskop - anders als bei Weltraumteleskopen - keine drastischen Volumenbegrenzungen durch die Nutzlastverkleidungen von Raketen vorhanden. Dies erlaubt größere Spiegeldurchmesser. Für das Projekt sind Daten über das Streulicht in der Stratosphäre von großer Bedeutung.
Einer der beiden Sensoren, die auf BUBBLE 1 mitfliegen, ist ein einfacher Helligkeitssensor (quasi eine ein-Pixel-Kamera). Durch ein kegelförmiges Baffle wird die direkte Sonneneinstrahlung minimiert, sodass nur das Streulicht gemessen wird. Der andere Sensor ist eine Raspberry Pi Kamera, die einen größeren Himmelsausschnitt erfasst. Die Bilder können dann später mit den Daten des Helligkeitssensors abgeglichen werden. Beide Sensoren sind um 30° zum Horizont nach oben geneigt. Die Daten werden auf einem on-board-Speicher gesichert und nach der Landung ausgelesen.

Gondel
Die Gondel besteht aus zwei Pyramiden mit quadratischer Grundfläche. Dies dient dazu, die Sensoren um 30° nach oben neigen zu können. Die Pyramiden bestehen aus CFK-Stäben, die in den Ecken von 3D-gedruckten Kunststoffteilen zusammengehalten werden. Die Wände sind zur Isolation mit Styrodur verkleidet. Die gemeinsame Grundfläche der Pyramiden ist eine Kunststoffplatte, die sämtliche Komponenten trägt. Die Gondel ist an den Ecken der Grundplatte und an der Spitze mit Schnüren aufgehängt.
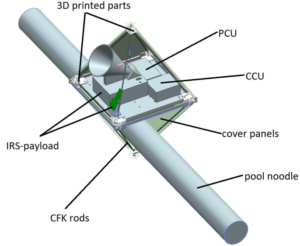
In der oberen Pyramide befindet sich neben den Nutzlastsensoren auch der Hauptcomputer (CCU). Dies ist ein Raspberry Pi mit einem Pi-in-the-Sky-Erweiterungsmodul. Er kommuniziert mit dem Nutzlastcomputer (PCU) mittels Ethernet over USB. Außerdem werden an die CCU eine GPS-Antenne und die Antenne für die Kommunikation mit der Bodenstation angeschlossen. Letztere Antenne ist an der unteren Spitze der Gondel befestigt. Zusätzlich ist in der oberen Pyramide aus Redundanzgründen ein Iridium-Modul mit einem weiteren GPS-Empfänger montiert. Dieses sendet Positionsdaten über das Iridium-Satellitennetzwerk an die Bodenstationen.
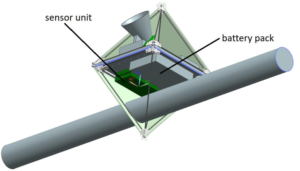
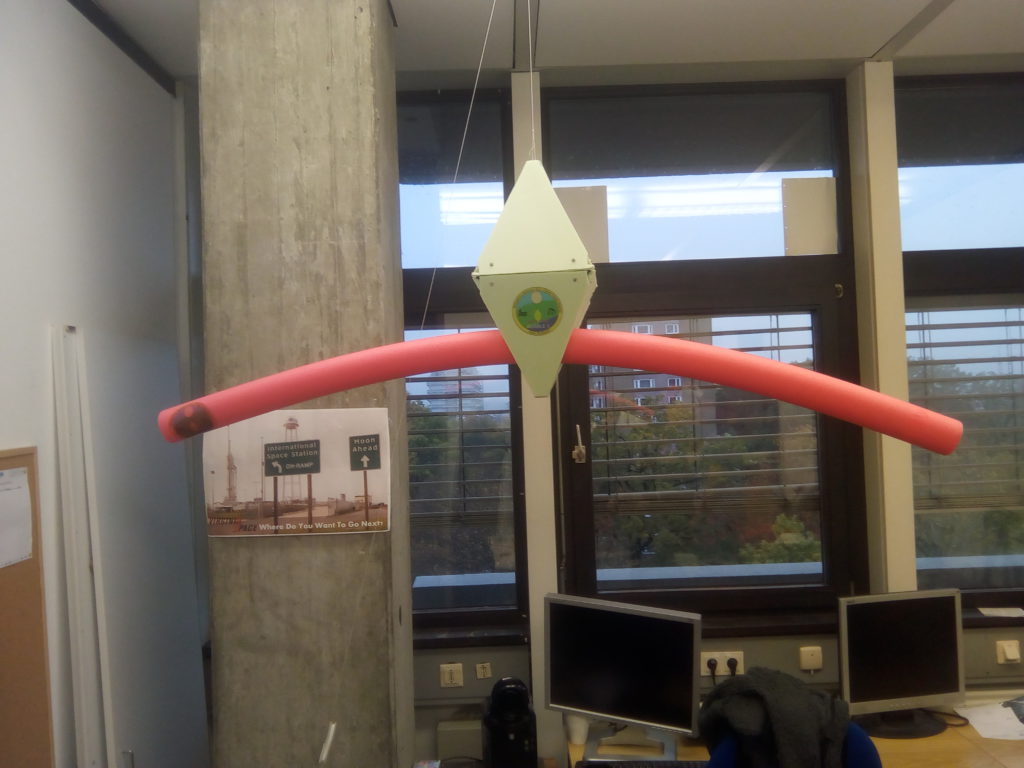
Durch die untere Pyramide ist eine Schwimmnudel gesteckt, um das Trägheitsmoment und den Luftwiderstand gegen Rotation zu erhöhen und damit die Drehrate der Gondel zu minimieren. Ebenso ist der Akku und eine Sensor Unit mit Accelerometern, Gyroskopen, Drucksensor, Temperatursensor und einem Magnetometer im unteren Teil untergebracht.
An einer Schnur unterhalb der Gondel hängt eine umprogrammierte Wettersonde (RS41), welche als weitere Redundanz die aktuelle GPS-Position an die Bodenstationen übermittelt und komplett unabhängig mit eigener Batterie betrieben wird. In der Grafik wird diese mit Secondary Payload bezeichnet.
Der Flug von BUBBLE 1
BUBBLE 1 wurde am 22. Januar 2019 gestartet. Der Ballon erreichte die Mindesthöhe von 30 km und platzte erst bei knapp 35 km. Auch die Aufstiegsgeschwindigkeit betrug, wie geplant, recht genau 5 m/s. Der Fallschirm öffnete sich und BUBBLE 1 konnte etwa eine halbe Stunde nach der Landung in einem Wald bei Bad Boll geborgen werden, etwa 40 km Luftlinie vom Startort entfernt. Der Fallschirm musste aber in einem Baum zurückgelassen werden.
Leider konnten von der Nutzlast nicht sehr viele Daten aufgezeichnet werden. Dies lag an einigen Softwareproblemen an der Schnittstelle zwischen PCU und CCU. Auch wurde das Innere der Gondel sehr kalt. Die Isolation muss für den nächsten Flug verbessert werden, auch wenn es nicht zu kältebedingten Ausfällen kam. Die Daten der Gyroskope und Beschleunigungssensoren zeigten, dass die Rotation der Gondel stärker war als erwatet. Die Aerodynamik der Gondel ist also verbesserungsbedürftig. Auch Pendelbewegungen der Gondel könnten noch verringert werden (z.B. durch eine längere Schnur).
Das Iridium-Modul musste vor dem Start deaktiviert werden, da es Instabilitäten in der Software gab. Die CCU und die Sensor Unit haben wie erwartet funktioniert, allerdings wurde der GPS-Empfänger der CCU ab einer Höhe von 12 km blockiert. Die Wettersonde funktionierte zuverlässig. Es war also sehr sinnvoll, drei redundante Telemetrieverbindungen vorzusehen, da letztlich lediglich eine davon vollständig genutzt werden konnte.
Eine oberhalb der Gondel montierte GoPro zeichnete in etwa die erste Hälfte des Aufstiegs auf, bevor der Akku erschöpft war. Dies war erwartet worden, da die Kamera erst kurz vor dem Start montiert und ohne zusätzliche Batterie und mit nur geringer thermaler Isolation ausgestattet war.
Sämtliche Systeme der Ballongondel haben keine Schäden davongetragen und können wiederverwendet werden.













BUBBLE 2
Die Entwicklung von BUBBLE 2 begann im Juli 2019.
Aufgrund einiger Probleme in der Software konnten bei BUBBLE 1 nur wenige Nutzlastdaten gewonnen werden. Deshalb soll dieselbe Nutzlast nun nochmals geflogen werden.
Neben der Behebung der Softwareprobleme wurde auch die mechanische Struktur der Gondel verbessert. Ein besseres Thermalmanagement und günstigere aerodynamische Eigenschaften waren die Ziele dieser Veränderungen. Auch die Schirmung der elektronischen Komponenten wurde überarbeitet, um elektromagnetische Interferenzen zu minimieren.
Zwei weitere Nutzlasten werden auf BUBBLE 2 fliegen. Ein LoRa-Modul zum Testen von zwei-Wege-Kommunikation und ein Iridium-Modul für Telemetrie-Downlink per Satellit.
BUBBLE 2 hatte einen erfolgreichen Flug am 17. Juni 2021. Hier gibt es einen kurzen Bericht darüber. Nachdem alle Daten ausgewertet sind, wird diese Seite mit weiteren Details gefüllt werden. Es gibt jedoch bereits ein Video vom gesamten Flug aus der on-bord Perspektive:

BUBBLE 2 während der Integration

zusammengebaute Gondel

BUBBLE 2 während des Gesamtsystemtests am Boden
BUBBLE 3
Für die dritte Iteration von BUBBLE nutzen wir ein neues Gondeldesign, das einfacher montierbar sein wird als die Doppelpyramidenform der vorherigen Missionen. Seine Form wird quaderförmig sein und seitlich angebrachte Finnen zur passiven Stabilisation im Luftstrom haben. Im Innern ist ein einfach adaptierbares Regalsystem geplant um die verschiedenen Nutzlasten unterbringen zu können. Auch außen angebrachte Nutzlasten werden möglich sein.
Die Nutzlasten beinhalten:
- ein Netz aus Temperatursensoren um räumlich hochaufgelöste Temperaturdaten aus verschiedenen Bereichen der Gondel zu gewinnen. Dies dient zur Verbesserung von thermalen Simulationen und ist eine Nutzlast des IRS.
- ein Prototyp eines Flight Termination Systems, das später die Schnur zwischen Ballon und Fallschirm kappen soll um das Verheddern der Ballonreste mit dem Fallschirm zu verhindern. Auf BUBBLE 3 wird testweise eine vorgespannte Schnur an der Außenseite der Gondel durchtrennt um den Mechanismus in den Umgebungsbedingungen auf 30 km Höhe zu testen.
- Kamera(s)
- ...
Da unser bisher verwendeter Onbord-Computer nicht mehr lieferbar ist, wollen wir auf einen neuen umsteigen, was eine Neuentwicklung der Software nötig macht. Auch wollen wir die Power Control and Distribution Unit (PCDU) verbessern um die Stromversorgung für Nutzlasten schaltbar zu machen. Außerdem werden in der PCDU mehr Sensoren zur Leistungsüberwachung installiert. Als Kommunikationssystem soll LoRa als hauptsächlicher Up- und Downlink verwendet werden. Außerdem werden gelegentlich Daten per Iridium-Satellitennetzwerk übertragen. Ein Software Defined Radio (SDR) wird ebenso an Bord sein um die Funk-Umgebung in der Stratosphäre zu beobachten und als Basis für zukünftige Funkexperimente zu dienen.
Der Start von BUBBLE 3 ist auch für den Sommer 2021 geplant.

Blockschaubild der Elektrik und der Datenverbindungen
Aktuelles

BUBBLE 2 erfolgreich gestartet!

BUBBLE 2 führt erfolgreichen Systemtest durch – bereit zum Start!

BUBBLE-Team testet Tracking- & Recovery

Erfolgreicher Flug von BUBBLE 1
Bauen beginnt, Testen läuft
Projektsponsoren
Institut für Photovoltaik
Das Institut für Photovoltaik (ipv) der Universität Stuttgart steht uns mit Expertise zur Seite und unterstützt das Projekt finanziell.