PING
Die Aufgabe
Ziel der CanSat-Challenge 2018/19 ist es, nach dem Abwurf aus 300m Höhe soviele Nachrichten wie möglich von einer Bodenstation zu empfangen, verarbeiten und richtig zu beantworten. Die Nachrichten können unterschiedlich schwer zu beantworten sein, z.B. kann ein einfacher Ping angefragt werden oder auch deutlich rechenintensivere mathematische Operationen wie eine Primfaktorzerlegung oder Matrixinversion. Je mehr Nachrichten verarbeitet werden konnten und je schwieriger diese Nachrichten sind, desto mehr Punkte erhält das Team.
Um folglich eine hohe Punktzahl zu erreichen müssen sowohl eine effiziente, schnelle Verarbeitung und Kommunikation, sowie ein möglichst langsamer Abstieg des CanSats die Hauptziele der Entwicklung sein.
Das Team
Wir sind das Team PING (Pristine INformation Transmission Gizmo) und bestehen aus mittlerweile 7 Mitgliedern. Wir vereinen zusammen die Studiengänge Luft- und Raumfahrt, Physik, Simulationstechnik und technische Kybernetik und können von diesem breiten Spektrum sehr profitieren.
Das Konzept
Wir sind der Ansicht, dass gute Lösungen nicht kompliziert sein müssen. Darum waren wir bei der Auslegung unseres Konzepts darauf bedacht, Ansätze zu finden, die sich mit unseren Möglichkeiten gut und schnell realisieren lassen und bei denen leicht Änderungen durchgeführt werden können, ohne große Rückschläge zu erleiden.
Um einen langsamen Abstieg zu ermöglichen, bedient sich unser CanSat eines Rundkappen-Fallschirms, der aufgrund seiner Einfachheit und Verlässlichkeit schnell zu einem festen Teil des Konzepts wurde.
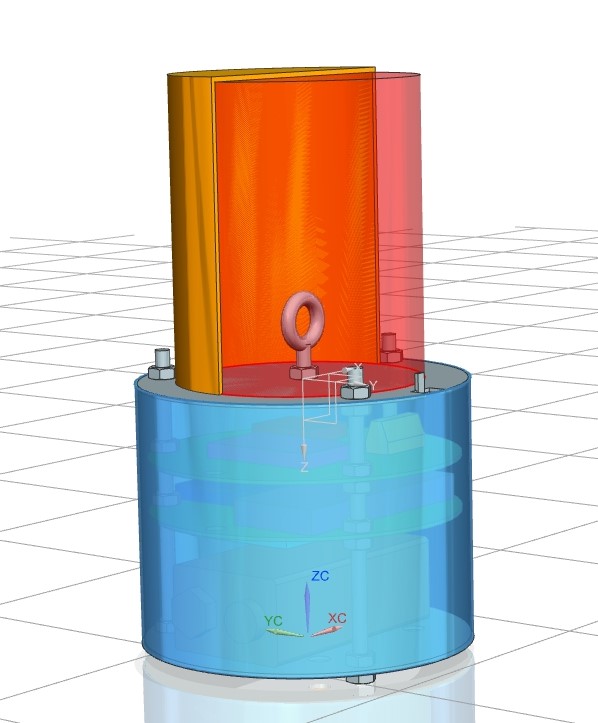
Der Strukturaufbau besteht aus einer Ebenenstruktur, die von 3 Gewindestangen mit Muttern fixiert wird. Als Plattform zur Nachrichtenverarbeitung nutzen wir einen Arduino Nano, gekoppelt mit einem XBee Receiver, Luftdruck- und Beschleunigungssensoren sowie einer SD-Speicherkarte.
Flug
Nachdem wir alle Reviews bestanden hatten fand am 16.05.2019 der Start statt. Leider wurde der Fallschirm bei keinem unserer zwei Flüge geöffnet. Allerdings überlebte die Struktur zwei harte Landungen nach 300m freiem Fall mit erstaunlich geringen Schäden und die Elektronik war selbst nach dem zweiten Flug noch einigermaßen funktionsfähig. Wie der Start genau verlief kann im folgenden Video verfolgt werden: