Robotic in-Orbit Analysis of Cover Hulls
ROACH (Robotic in-Orbit Analysis of Cover Hulls) war unser zweites Experiment im Rahmen des REXUS/BEXUS Programms. Hierzu hatte das KSat/ROACH Team im Herbst 2016 erfolgreich eine Bewerbung für den REXUS 23/24 Zyklus eingereicht. ROACH wurde 2018 abgeschlossen. Das Nachfolgeprojekt ist ROACH 2.
Ziele des Experiments
Motiviert wurde das ROACH-Projekt aus den Gefahren, welche Weltraummüll und Mikrometeoroiden auf Weltraumstrukturen wie Satelliten, Raumstationen und Oberstufen darstellen. Zudem stellt Materialermüdung unter der anspruchsvollen Thermal- und Vakuumumgebung des Alls eine potentielle Gefahr dar. Um Beschädigungen und Veränderungen am Material erkennen zu können, ist es folglich ratsam in regelmäßigen Abständen diese Strukturen zu untersuchen. Regelmäßige Inspektionen und Wartungsarbeiten könnten in Zukunft dazu führen, dass Weltraumstrukturen weniger konservativ ausgelegt werden müssen. Einen neuen Ansatz dazu könnten miniaturisierte Roboter bieten, die sich mithilfe von Elektroadhäsion auf den Strukturen bewegen können und mit Sensorik zum Detektieren von Schäden ausgestattet sind. Möglicherweise könnten diese Roboter zukünftig auch selbst kleinere Reparaturen vornehmen. Ziel des ROACH Experimentes war es, den ersten Prototypen eines solchen Roboters zu entwerfen, zu bauen und zu fliegen, und damit das zugrundeliegende Prinzip zu prüfen.
Im Detail lauteten die Ziele des Experiments:
Primär:
- Validierung der Funktionalität elektrostatischer Adhäsionsfolien unter weltraumähnlichen Bedingungen
- Validierung des Antriebsmechanismus des Rovers unter reduzierter Gravitation
Sekundär:
- Der Rover bleibt während der Mission vollständig mit dem vorgegebenen Pfad in Kontakt und bewegt sich planmäßig entlang diesem
- Untersuchung der Oberfläche entlang des zurückgelegten Weges
Experimentaufbau
Kern des Experiments war der Rover, bestehend aus einem integral 3D-gedruckten Chassis aus ABS-Kunststoff und Zahnriemen, an denen die Adhäsionspads angebracht waren. Während des Starts wurde der Rover mithilfe eines Sicherungsmechanismus vor den auftretenden mechanischen und thermischen Lasten geschützt. Hierzu klemmten zwei Stifte den Rover am oberen Sicherungsblech fest, so dass die empfindlichen Folien nicht im Kontakt mit anderen Oberflächen waren. An Bord des Rovers waren mehrere Instrumente angebracht:
- Rotationsencoder zur internen Überprüfung des Fortbewegungsmechanismus
- Näherungssensoren in Richtung Fahrbahn zur Feststellung eines möglichen abgelösten Zustands
- Inertiale Messeinheit zur Analyse der Bewegung
Zusätzlich beobachteten drei externe Kameras sowie eine an Bord des Rovers den Experimentablauf. Ein Spiegel ermöglichte es, eine weitere Perspektive ohne zusätzliche Kamera zu erhalten.
Der Rover wurd von einem On-Board Computer (OBC) im Raketenmodul kontrolliert. Die abschließende Ansteuerung seiner Hardware erfolgte durch einen Microcontroller auf dem Rover selbst (Rover Control Unit RCU). Als Verbindung wurde ein Kabel nach USB 2.0 Standard genutzt. Der OBC verarbeitete dabei alle vom Computer der Rakete kommenden Befehle (primär Start und Ende der Experimentphase) und diente als Watchdog für die RCU.
Die verschiedenen Prozessoren und Anwendungen machten die Verwendung mehrerer Programmiersprachen sinnvoll. Für die Bodenstation kam Java, für den OBC Python und für die RCU C++ zum Einsatz.


Funktionsprinzip der Elektroadhäsion
Die Adhäsionsfolien an den Ketten des Rovers bestanden aus flexiblem Leiterplattenmaterial mit einer Schicht Kupfer und Isolationsschichten aus Polyimid. Zwischen der Kupferschicht und der Fahrbahn wurde eine elektrische Spannung von einigen kV angelegt. Aufgrund des geringen Abstandes zwischen beiden Elektroden konnten sich dazwischen starke elektrische Felder bilden, welche die Adhäsionspads und somit den Rover an die Fahrbahn ziehen konnten. Diese Methode funktioniert nur auf leitfähigen Fahrbahnen, aber es ist theoretisch auch möglich, mit zweipoligen Pads elektrische Felder zu erzeugen, die einen dielektrischen Untergrund polarisieren und somit auch Anziehungskräfte entstehen.
Die besten Ergebnisse im Rahmen von ROACH 1 wurden mit der Kaptonfolie DuPont Pyralux HT8515R mit einer Polyimidschicht von 25 µm und einer Kupferschicht von 9 µm Dicke erzielt. Bei 3 kV anliegender Spannung konnten Normalkräfte von 2,1 N auf Flächen von 50 x 50 mm² gemessen werden. Die ertragbaren Scherkräfte waren noch eine Größenordnung höher.
Im realen Einsatz am Rover sank die Anziehungskraft auf ca. 0,5 N für insgesamt 4-6 Pads in gleichzeitigem Kontakt. Die verringerte Effektivität ist vermutlich auf den suboptimalen Kontakt zur Oberfläche aufgrund der Geometrie der Kette zurückzuführen. In einer nach dem Projekt verfassten Bachelorarbeit wurde dies unter anderem genauer beschrieben und alternative Fortbewegungskonzepte erarbeitet, welche in ROACH 2 mündeten.

Testkampagnen
Das Experiment wurde im Vorfeld mechanisch und thermisch mithilfe numerischer Simulationstools überprüft. Zum Nachweis der Beständigkeit gegen die erwarteten Lasten fanden Shakertests und Thermal-Vakuum-Tests bei Thales Alenia Space in Ditzingen und beim Zentrum für angewandte Raumfahrt & Mikrogravitation (ZARM) in Bremen statt. Bei allen Tests verhielt sich das Experiment innerhalb der erwarteten Limits. Die Nutzung von Hochspannung in einem Vakuum äquivalent zu der Flughöhe der Rakete von ca. 80 km brachte jedoch einige Herausforderungen mit sich. Da die Sprungdistanz elektrischer Entladungen dort stark vergrößert ist, musste bei der Isolation der Hochvoltkomponenten mit größter Sorgfalt vorgegangen werden.
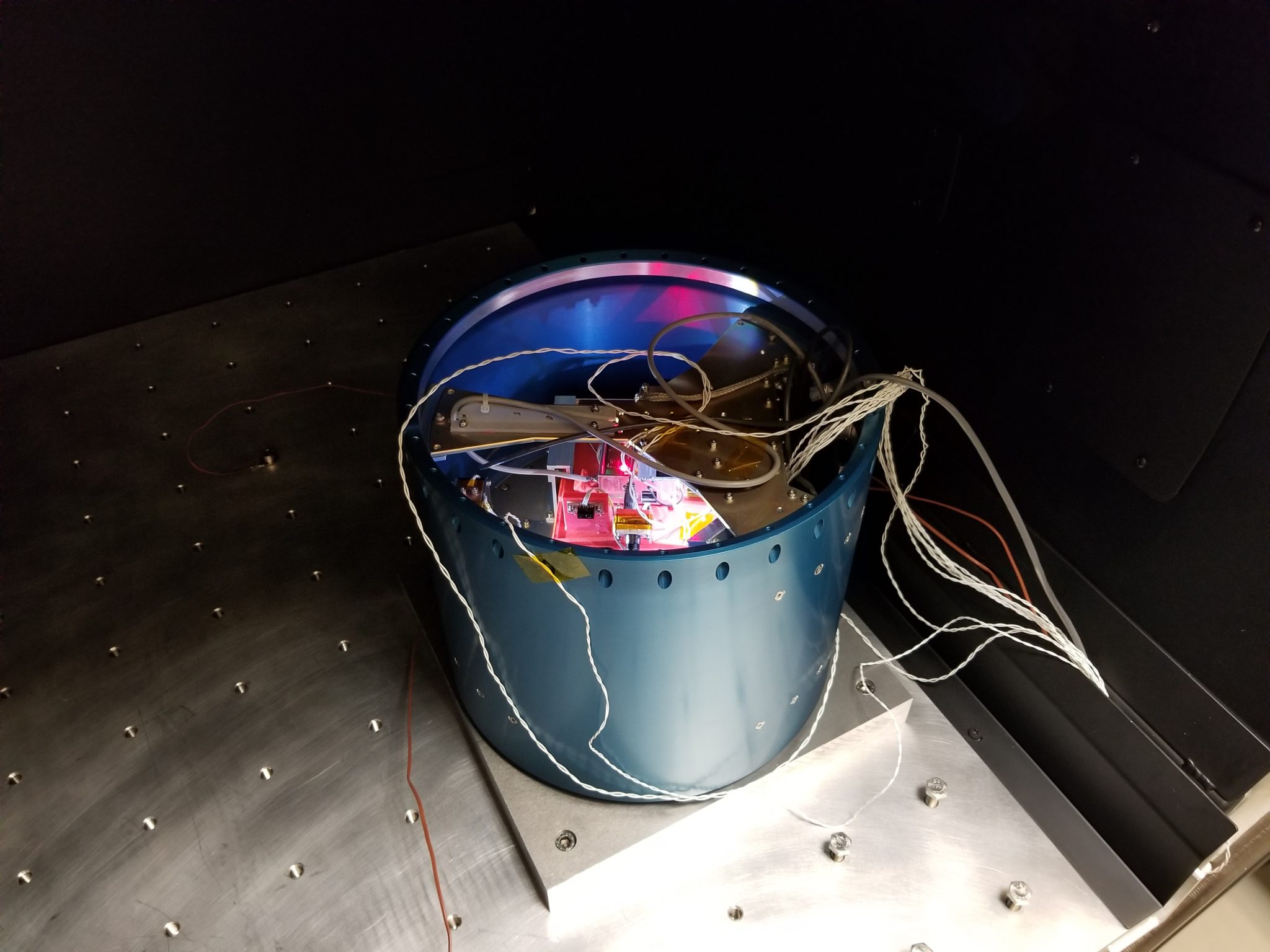
ROACH 1 in der Thermal-Vakuum-Kammer
Flug
ROACH wurde im März 2018 auf REXUS 24 in Kiruna, Schweden, vom Esrange Space Center gestartet. REXUS-Raketen nutzen einen Orion-Feststoffmotor als Antrieb und tragen vier bis fünf Experimentmodule mit 35,6 cm Durchmesser und bis zu 30 cm Höhe. Die Raketen erreichen bis zu Mach 3 und ca. 80 km Höhe. Dadurch können etwa zwei Minuten in Mikrogravitation und Vakuum erreicht werden. Für diese zwei Minuten wurde der Hauptteil des Experiments geplant. Der ungefähre Ablaufplan sah so aus:
- T-600 s Aktivierung der Energiezufuhr durch REXUS, Aktivierung des OBC im „Idle“ Modus
- T-60 s Übergang in den „Ascend“ Modus
- T-0 s Zündung
- T+70 s Separation der Nasenspitze und des Raketenmotors, Abbau der beim Aufstieg gewonnenen Drehbewegung der Rakete, „Start of Data Storage“ (SODS) - Signal vom Raketencomputer und Aktivierung der Sensoren
- T+80 s Lösen der Sicherungsbolzen per Pyrocutter, Aktivierung der Adhäsionspads und Beginn der Fortbewegung
- T+140 s Apogäum (Punkt größter Höhe)
- T+220 s Ende der Mikrogravitation, Wiedereintritt in dichtere Atmosphäre
- T+380 s Öffnen des Fallschirms
- T+800 s Landung des Moduls
Der geplante Ablauf ist auch in diesem Video erklärt:
Der Flug verlief jedoch leider nicht wie erwartet. Der ungeplante Auswurf mindestens einer Freifalleinheit eines anderen Experiments wenige Sekunden nach dem Start führte wahrscheinlich zu einer Beschädigung der Leitwerke der Rakete und schließlich zu ihrem Auseinanderbrechen. Das Nutzlastmodul inkl. ROACH erreichte eine maximale Flughöhe von deutlich unter 10 km und stürzte dann ungebremst zu Boden. Der Abschlussbericht der Unfalluntersuchung kann online eingesehen werden. Unser Experiment konnte also nicht wie geplant durchgeführt werden und es wurde mit ROACH 2 ein neuer Anlauf gestartet. In einem ausführlichen technischen Bericht haben wir unseren gesamten Entwicklungsprozess dokumentiert. Auch in diesem wissenschaftlichen Paper finden sich Informationen zu ROACH.
REXUS/BEXUS Programm
REXUS/BEXUS ist ein internationales Studierendenprogramm in Kooperation des deutschen Zentrums für Luft- und Raumfahrt (DLR) mit der schwedischen nationalen Raumfahrtagentur (SNSA). Es gestaltet sich als Wettbewerb und bietet Studierenden die Möglichkeit, ihre eigenen Ideen als technische Experimente unter Bedingungen durchzuführen, die denen im Weltraum ähnlich sind. Dazu gehören etwa der Einfluss von Weltraumstrahlung oder das Verhalten bei reduzierter Schwerkraft. Dabei besteht die Möglichkeit, die Experimente entweder auf einer fast sechs Meter langen Rakete durchzuführen (REXUS), die in bis zu 100 Kilometern den Gipfel ihrer Flugbahn erreicht, oder einen sogenannten Stratosphärenballon zu nutzen (BEXUS), der im freien Flug eine Höhe von bis zu 35 Kilometern erreichen kann.
Während der gesamten Projektzeit werden die deutschen Studententeams vom DLR Raumfahrtmanagement in Bonn betreut und lernen somit den vollständigen Ablauf eines Raumfahrtprojekts kennen, von der Idee selbst bis zur Veröffentlichung der Ergebnisse.
REXUS/BEXUS Partner



DLR e.V.
Deutsches Zentrum für Luft- und Raumfahrt
SNSA
Swedish National Space Agency
SSC
Swedish Space Corporation
ESA
European Space Agency
ZARM
Zentrum für angewandte Raumfahrt-technologie und Mikrogravitation
Eurolaunch