Übersicht
Vom 9. bis 13. Dezember fand in Bremen am ZARM die REXUS Integration-week statt. In dieser Woche wurde das Experiment zusammengebaut, auf einem Vibrationstisch einer Vibrationsanalyse unterzogen und während des Benchtests auf Kompatibilität untersucht.
Montag
Am Montag packten wir den Rest unserer Sachen ein und beluden das Auto. Danach machten wir uns auf eine lange Reise gen Norden. Die Ankunft im Hotel in Bremen war dann am Abend.
Dienstag
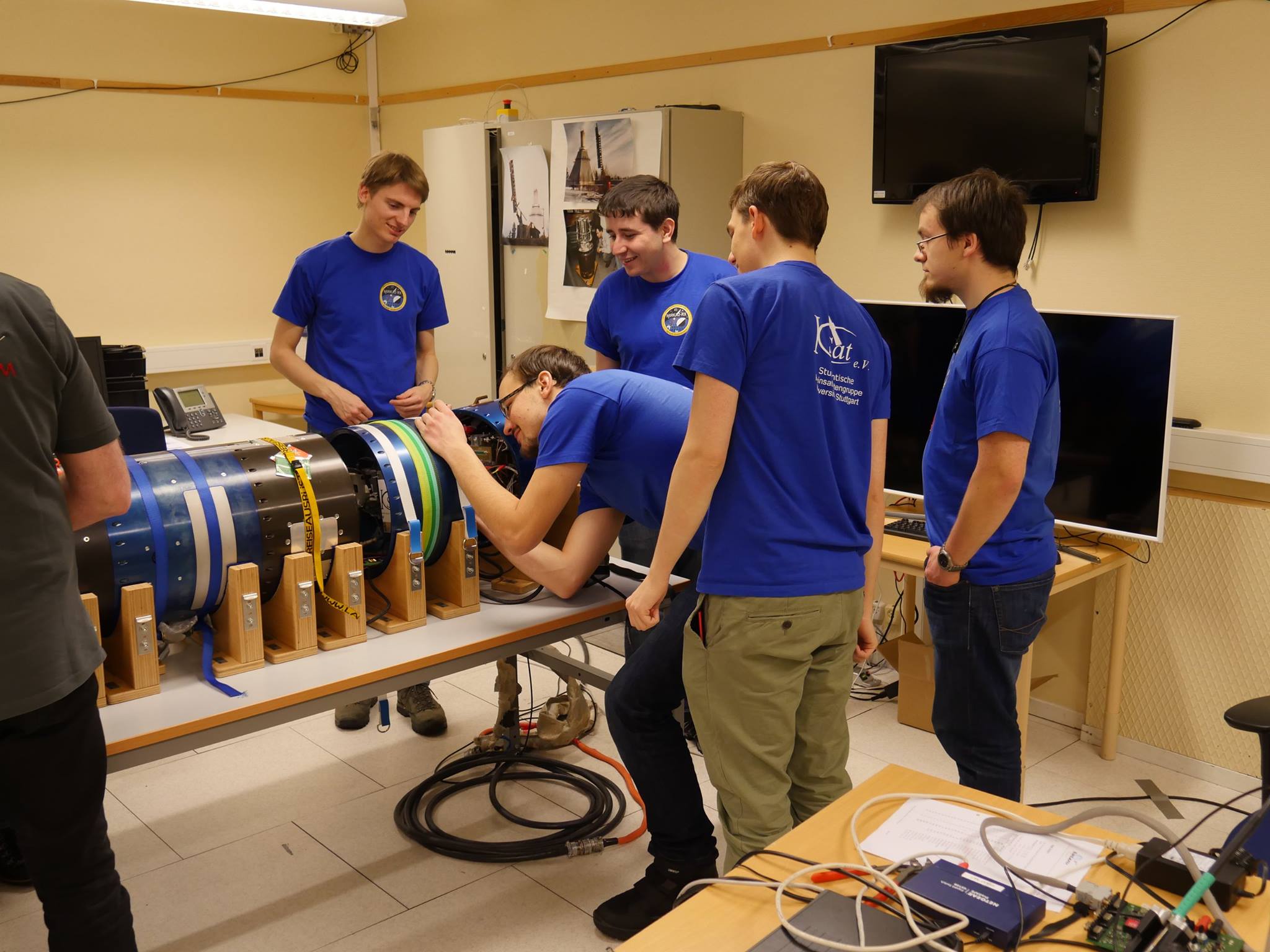
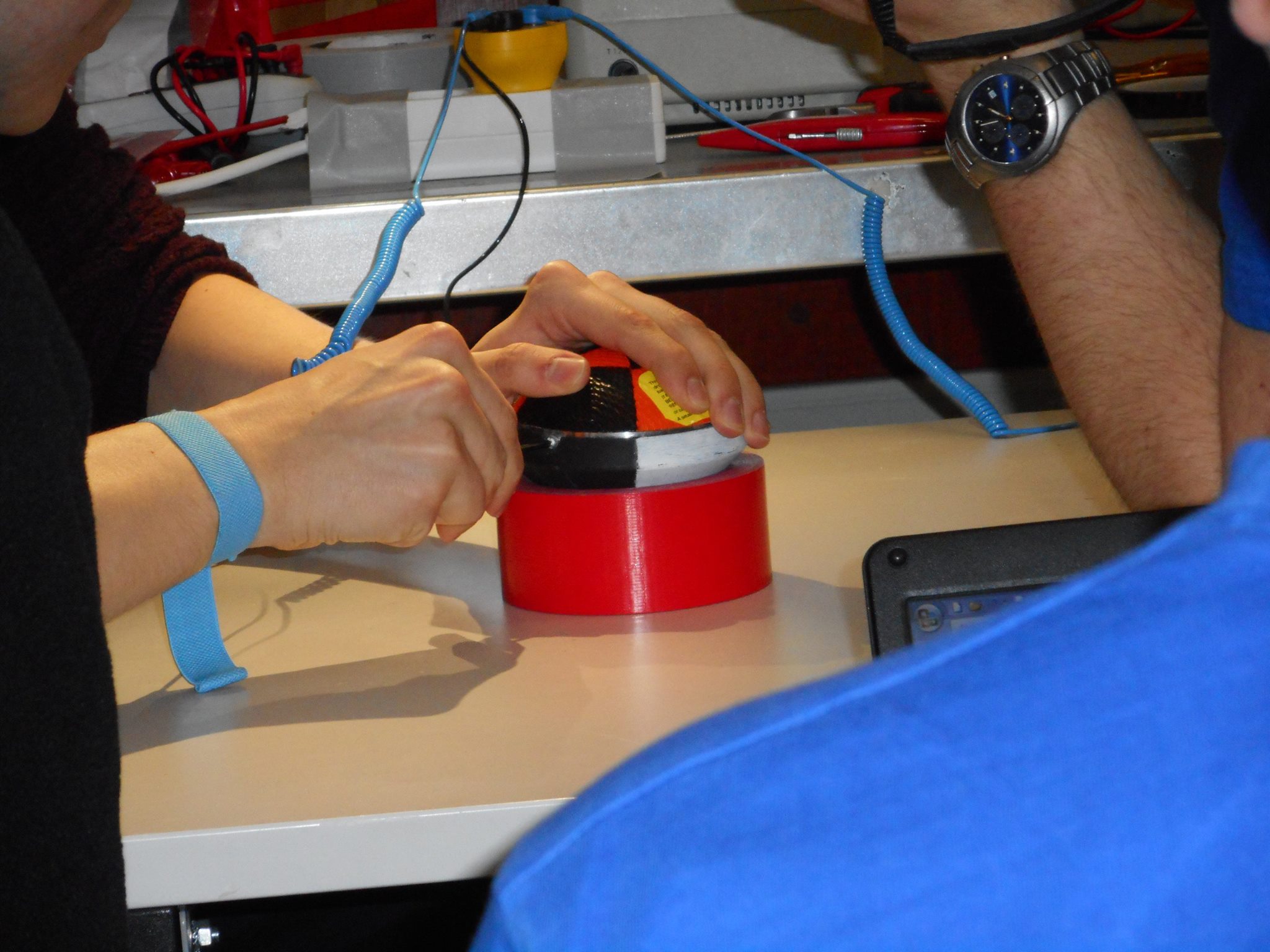
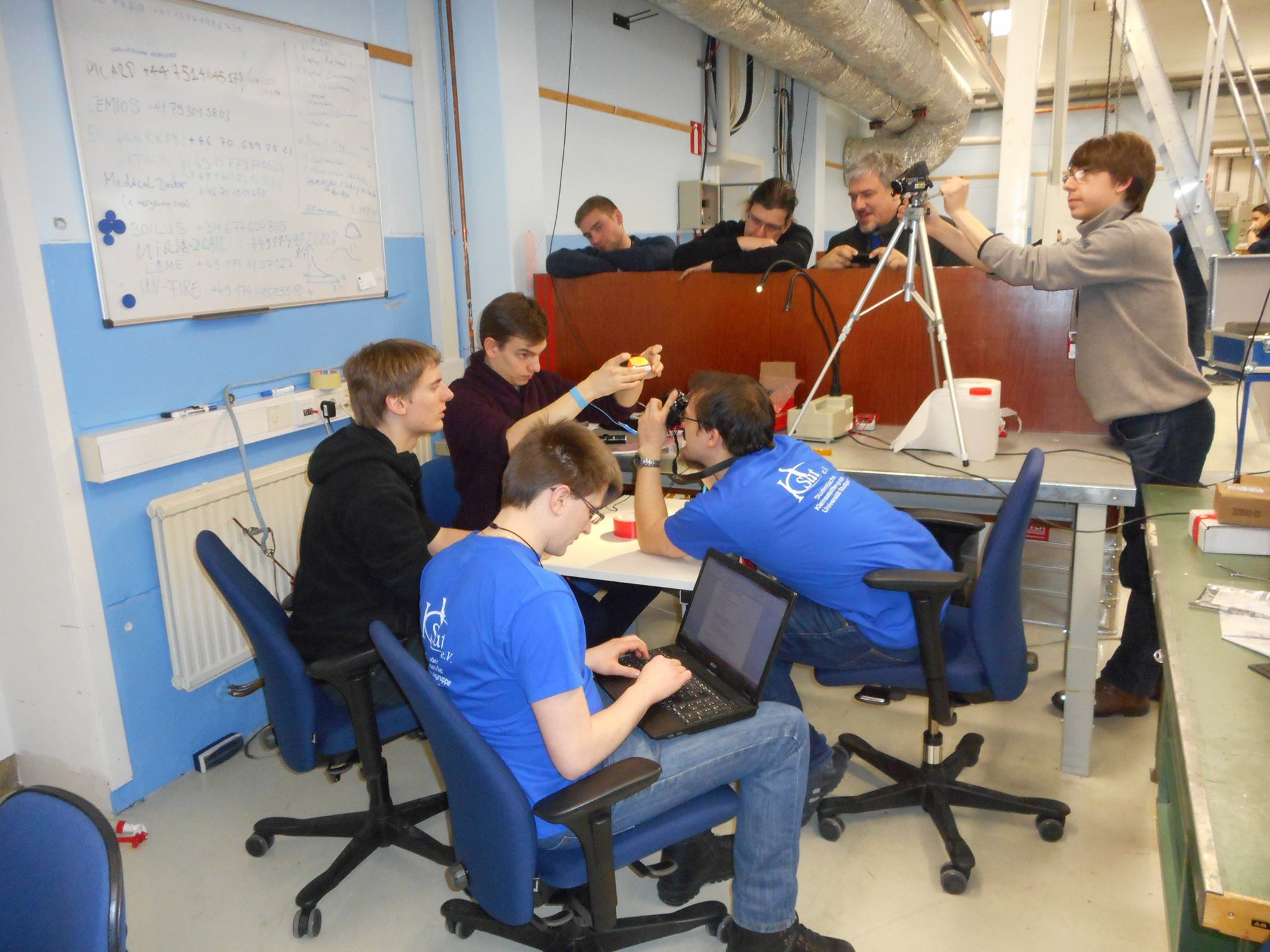
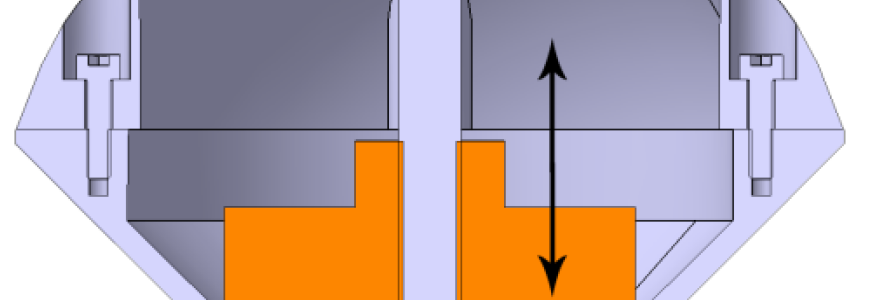
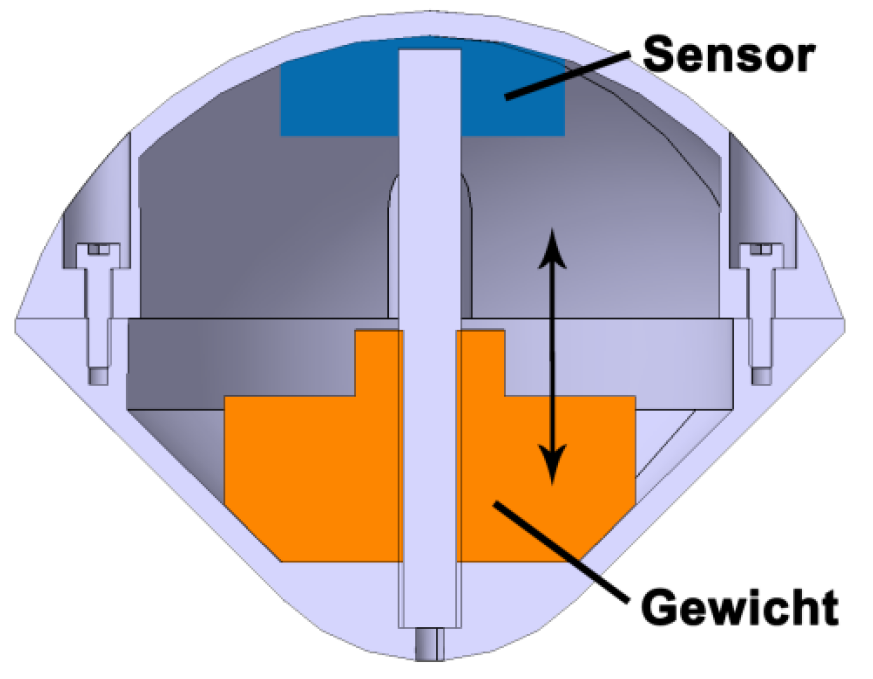
Der Dienstag war komplett für den Zusammenbau des Experimentes vorgesehen.
")
Mittwoch
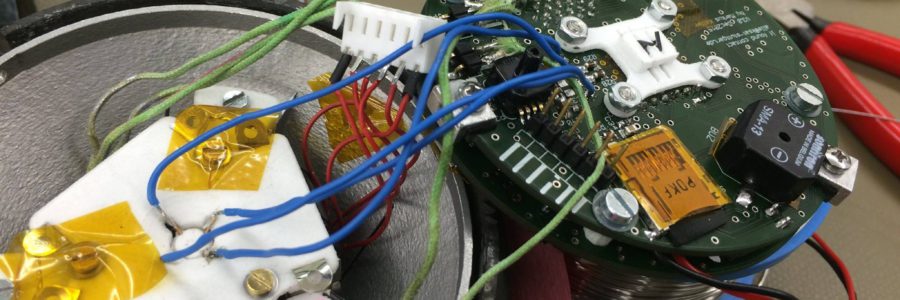
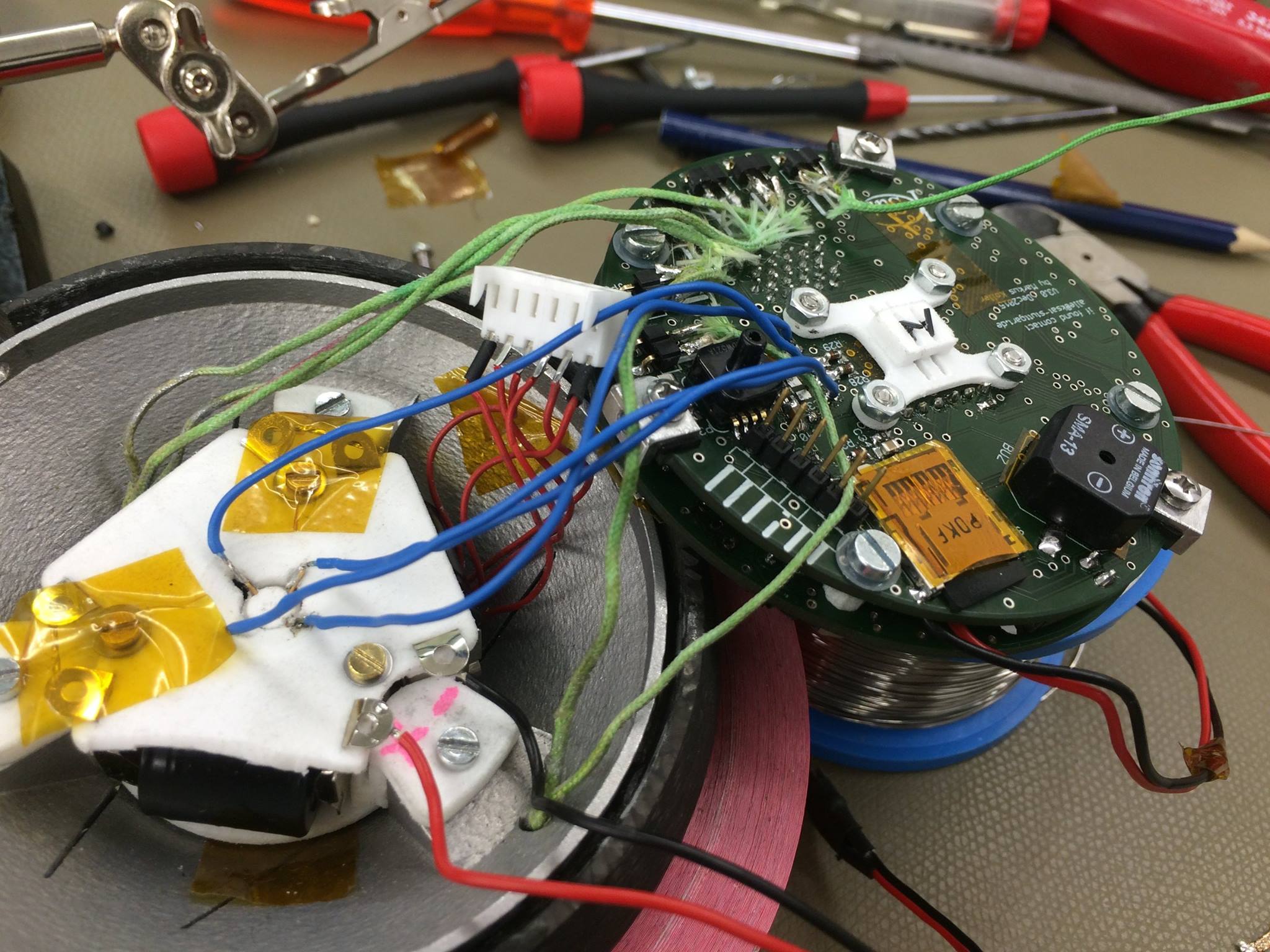
Am Mittwoch war eigentlich unser shaker-test vorgesehen. Da wir jedoch leider noch nicht bereit dafür waren, wurde dieser auf Donnerstag verschoben. Somit wurde auch dieser Tag mit Zusammenbauen verbracht. Am Abend kam noch eine Diskussion auf, ob unser Experiment vielleicht auf eine andere Rakete verlegt wird, da es Kompatibilitätsprobleme mit zwei anderen Experimenten gab. Wir setzten uns daher am Abend im Hotel zusammen und besprachen die Auswirkungen dieser Änderungen auf unser Experiment. Unser schlussendliches Ergebnis war, dass diese Änderung unser und andere Experimente aufgrund von Vibrationen gefährden würde.
")
")
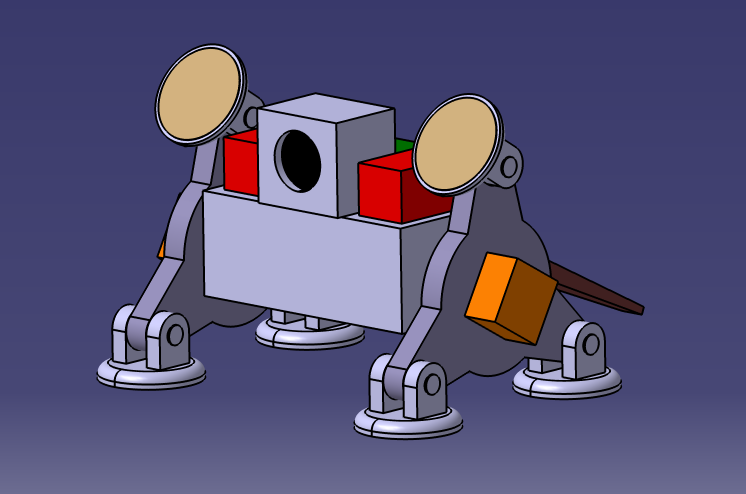
Nachdem wir im Vereinschat ein Bild unseres Rovers gepostet hatten, kamen einige Memes zurück, die wir hier nicht vorenthalten wollen.

Donnerstag
Am Morgen trafen wir noch letzte Vorbereitungen, bevor es dann am späten Vormittag auf den Shaker ging. Nach ein paar spannenden Minuten war es dann vorbei. Die Inspektion ergab, dass wir in eineigen Bauteilen ein paar Risse haben. Im Großen und Ganzen trat aber nichts Schlimmes und unerwartetes auf. Am Nachmittag hatten wir etwas Freizeit, in der wir auf das dritte Team auf der Rakete gewartet haben, bevor es dann am Abend den Benchtest gab. Nachdem eines der Experimente ein falsches Signal bei dem zweiten induziert hatte, wurde der Test dann abgebrochen und auf Freitag verlegt.
")

Freitag
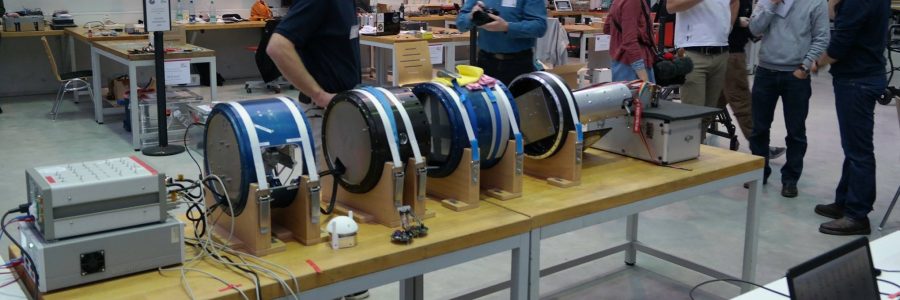
Am Freitag fand dann der Benchtest statt. Bei dem Benchtest werden alle Experimente zusammen mit dem Service-Modul aufgebaut und der gesamte Flugablauf simuliert. Das Ziel ist herauszufinden, ob die Experimente funktionieren und sicherzugehen, das sich die Experimente nicht gegenseitig beeinflussen. Dieser Test verlief dann ziemlich reibungslos, sodass wir um 11 Uhr fertig mit testen und einpacken waren und uns wieder auf den Heimweg machen konnten. In Stuttgart kamen wir dann am späten Abend wieder an.